Enviado por DIYouware el Lun, 09/22/2014 - 19:49
La semana pasada hicimos más pruebas para enfocar el láser.
La idea original consistía en enfocar el láser en cuatro puntos de enfoque que tienen un material reflectante y que van pegados bajo el cristal. El robot mueve automáticamente el láser a esos puntos de enfoque y toma cuatro medidas de enfoque. Entonces utiliza las medidas para extrapolar los datos al resto de la PCB, y así enfocar con precisión el láser mientras imprime el circuito. Parecía viable pero tuvimos algunos problemas con el espesor del vidrio. Estábamos usando un vidrio de 2mm y tuvimos que cambiar a vidrio de 1,5mm que funciona mejor. Pero incluso con el nuevo vidrio no estábamos satisfechos porque los puntos de enfoque estaban demasiado lejos de las esquinas de la PCB y las medidas de enfoque no eran muy precisas.
Si queríamos mejorar la precisión de enfoque tendríamos que enfocar en las esquinas de la PCB. Esto no es un problema porque la PCB es bastante reflectante como para enfocar directamente en ella, pero como siempre ocurre en estos casos aparecieron efectos secundarios. Primero al enfocar en las esquinas dejamos cuatro manchas en el dry-film porque el láser UV lo sensibiliza en esos lugares. Segundo tenemos que enfocar a través del cristal y del solar-film. Recordad que utilizábamos el solar-film para filtrar los rayos UV y proteger la PCB contra el efecto "halo" producido por la lente del pickup. El filtro funciona muy bien mientras imprimimos pero disminuye el rendimiento del láser cuando enfocamos. Así que estábamos de nuevo en un callejón sin salida.
Pero hemos encontrado una solución: utilizar el láser rojo.
El PHR-803T es fantástico. Tiene tres diodos láser: uno en la banda infrarroja para la lectura de CDs, otro en la banda roja para DVDs y otro en la banda de UV cercana para HD-DVD/Blu-ray, que es el que usamos para imprimir. Cuando hackeamos el pickup no prestamos mucha atención a los láser rojos porque estábamos centrados en sensibilizar el dry-film con luz UV, pero creo que ahora vamos a usar el rojo para enfocar.

Usar el láser rojo para enfocar tiene algunas ventajas:
Enviado por DIYouware el Vie, 09/12/2014 - 18:23
Hemos terminado las pruebas de impresión 3D con éxito así que ahora vamos a continuar con las pruebas del cabezal laser, pero antes permitidme explicar porqué es tan importante tener una plataforma perfectamente nivelada.
Como dije en mi anterior artículo estuvimos desarrollando código para probar el algoritmo de auto-nivelado de la plataforma. Este algoritmo se encuentra en el firmware del robot y se encarga de mantener la plataforma perfectamente nivelada mientras el robot se mueve.
El test que hemos desarrollado está basado en enfocar el laser sobre la plataforma midiendo la distancia a la plataforma en 36 puntos distribuidos en una matriz de 6 por 6.
Para comprobar si el algoritmo de auto-nivelado funciona bien hicimos las pruebas antes y después de calibrar el robot.
Los resultados fueron los siguientes:

Fig. 1 – Resultados de las pruebas antes del auto-nivelado.
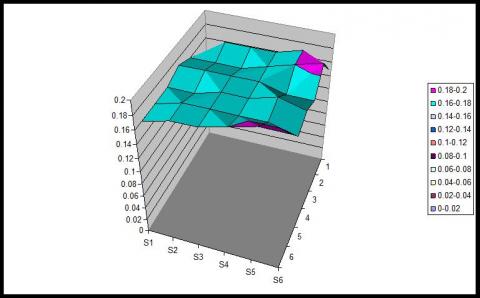
Fig. 2 – Resultados después del nivelado.
Enviado por DIYouware el Sáb, 09/06/2014 - 23:43
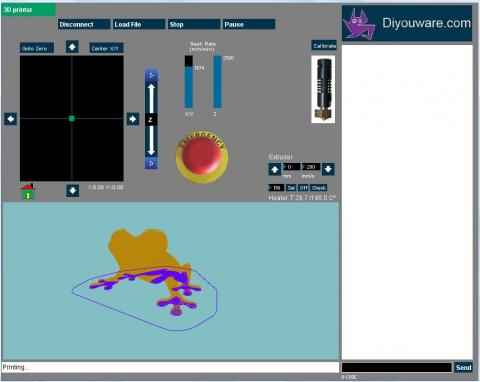
Simplemente enseñaros el primer objeto 3D impreso con el robot. Nos llevo aprox. una hora y la calidad es realmente buena.

Enviado por DIYouware el Vie, 09/05/2014 - 20:10
Después de tomar algunos días de vacaciones hemos continuado las pruebas del robot.
En los últimos días hemos estado trabajando en el cabezal 3D. Hicimos algunas pruebas con muy buenos resultados y de paso hemos probado los límites de velocidad de la máquina que están en aprox. 3500 mm/min (al imprimir en 3D).
Por otro lado hemos mejorado el software del servidor añadiéndole funcionalidad para controlar el extrusor y la temperatura del hot-end.
También hemos desarrollado un algoritmo para comprobar la eficiencia del mecanismo de auto-nivelado de la plataforma. Teníamos algunas dudas sobre su efectividad, pero después de algunas pruebas hemos visto que eran infundadas, y la plataforma siempre está autonivelada con una precisión de menos de 0.01mm.
Enviado por DIYouware el Mié, 07/09/2014 - 22:08
Algunos días atras describimos cómo habíamos diseñado la plataforma de fijación para que cumpliera todos los requisitos. Pues bien, hemos construido todos los componentes para probar si el sistema funciona y finalmente tiene este aspecto:
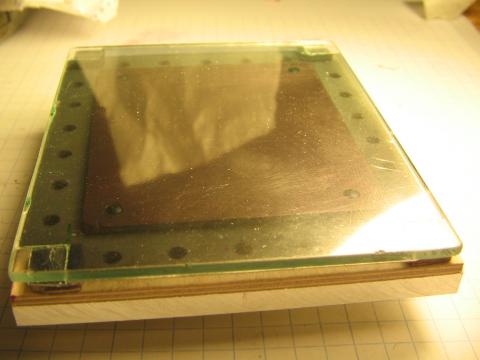
En la foto se pueden observar las diferentes capas de la solución:
Enviado por DIYouware el Jue, 07/03/2014 - 19:57
Continuamos con las pruebas de la impresora imprimiendo en modo raster.

Cada vez obtenemos mejores resultados.
También hemos diseñado una carcasa para alojar el conector para las herramientas.
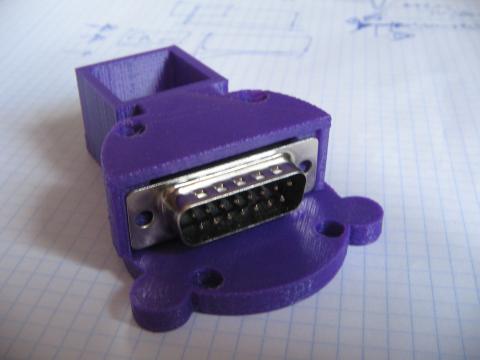
Estamos usando 15 hilos y un conector DB15 para transmitir todas las señales y líneas de corriente que pueda necesitar cualquier posible herramienta. La idea aquí es que cualquier adaptadador de herramienta pueda utilizar este conector con una configuración de pines estándar para conectarse a la impresora. De esta forma sustituir una herramienta por otra será mucho más fácil.
Enviado por DIYouware el Mar, 06/24/2014 - 17:35
La siguiente es una lista de las especificaciones preliminares del nuevo robot:
Área de trabajo (X, Y, Z)
70x80x80mm. La hemos reducido considerablemente a un tamaño de Shield Arduino. De hecho a veces llamamos al robot "The Arduino Shield maker". La hemos reducido porque preferíamos que fuese antes precisa que grande. Raramente creamos en casa PCBs de gran tamaño, pero si lo necesitáramos, siempre podemos dividir el circuito en dos o más módulos e imprimirlos por separado. Reducir el área de trabajo tiene algunas ventajas: el robot es más barato, más preciso, robusto, más pequeño y más manejable.
Mecánica
MKII es impulsado por tres motores Nema 17 y husillos trapezoidales. Sustituimos las correas dentadas que usamos en la MKI por husillos para eliminar los problemas de vibraciones y resonancias. Después de las primeras pruebas hemos visto que efectivamente es la solución y ahora el láser dibuja con un rayo preciso y estable sin ninguna perturbación mecánica.
Velocidad
Podemos ir tan rápido como 1.200-1.500mm/min. Creemos que es suficiente para nuestros propósitos. El paso (pitch) de los husillos establece el límite de velocidad. El robot puede ir más rápido actualizando los husillos a un paso más elevado pero aumentando considerablemente el precio.
Enviado por DIYouware el Jue, 06/19/2014 - 14:29
Hoy hemos recibido la plataforma de fijación de aluminio que ha mecanizado un amigo mío y es fantástica
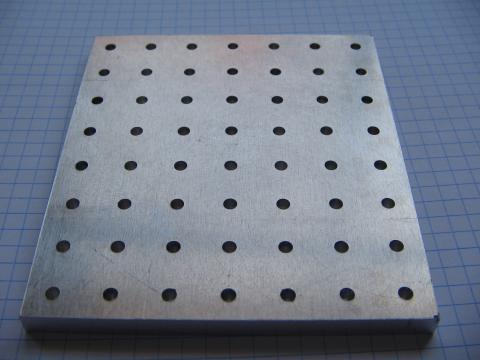
Una de las cosas que hemos aprendido en el desarrollo de la MKII es lo importante que es fijar bien la PCB a la plataforma de impresión.
Hemos intentado diferentes soluciones......
Enviado por DIYouware el Mar, 06/17/2014 - 21:52
Hoy hemos realizado más pruebas de impresión en modo rastering con resultados muy buenos.
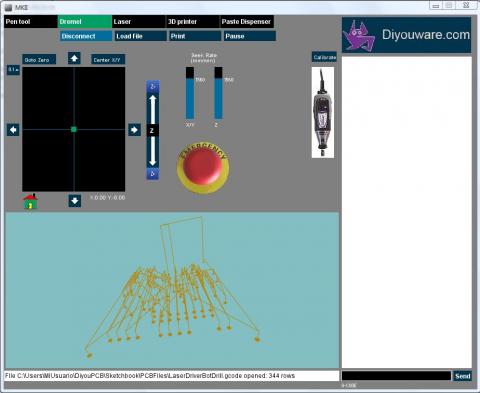
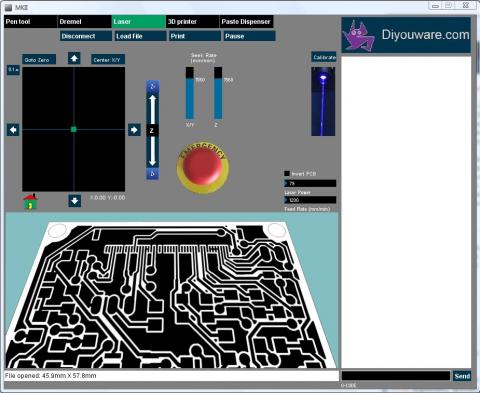
El proceso de imprimir en modo raster comienza en Eagle CadSoft. Allí tenemos que exportar la PCB a formato Postcript (Device: PS en el procesador CAM de Eagle). Una vez exportada sólo tenemos que abrirla con la nueva herramienta de gestión del robot (DiyouRun V2.0) y enviársela.
DiyouRun a cambiado mucho desde la última versión y ahora tiene un nuevo aspecto adaptado al nuevo robot.
Enviado por DIYouware el Dom, 06/15/2014 - 19:49
Algunas personas nos pidieron que describiéramos más detalladamente las capacidades del MKII.
El robot es muy versátil y puede hacer un montón de cosas. Todo depende del “cabezal” (toolhead) que instalemos en él.
Llamamos cabezal o "toolhead" al adaptador necesario para usar una herramienta determinada en el robot, por ejemplo una herramienta láser o un taladro. Una vez que tienes el cabezal adecuado a la herramienta es muy fácil utilizarla. Simplemente hay que desconectar la herramienta previamente instalada, instalar la nueva y listo.
Ya hemos diseñado algunos cabezales pero además...
Páginas