DiyouPCB MKII: Especificaciones preliminares
La siguiente es una lista de las especificaciones preliminares del nuevo robot:
Área de trabajo (X, Y, Z)
70x80x80mm. La hemos reducido considerablemente a un tamaño de Shield Arduino. De hecho a veces llamamos al robot "The Arduino Shield maker". La hemos reducido porque preferíamos que fuese antes precisa que grande. Raramente creamos en casa PCBs de gran tamaño, pero si lo necesitáramos, siempre podemos dividir el circuito en dos o más módulos e imprimirlos por separado. Reducir el área de trabajo tiene algunas ventajas: el robot es más barato, más preciso, robusto, más pequeño y más manejable.
Mecánica
MKII es impulsado por tres motores Nema 17 y husillos trapezoidales. Sustituimos las correas dentadas que usamos en la MKI por husillos para eliminar los problemas de vibraciones y resonancias. Después de las primeras pruebas hemos visto que efectivamente es la solución y ahora el láser dibuja con un rayo preciso y estable sin ninguna perturbación mecánica.
Velocidad
Podemos ir tan rápido como 1.200-1.500mm/min. Creemos que es suficiente para nuestros propósitos. El paso (pitch) de los husillos establece el límite de velocidad. El robot puede ir más rápido actualizando los husillos a un paso más elevado pero aumentando considerablemente el precio.
Código
MKII soporta G-Code en vez de HP-GL. También hemos incluido soporte de archivos Postscript y BMP cuando dibujamos con el láser. Eagle puede exportar a archivos Postscript muy fácilmente. Soportar archivos BMP significa que además de PCBs podemos también grabar imágenes en cobre, aluminio, bronce, etc.
Láser
Estamos usando el mismo Pickup laser (el PHR-803T) que en la MKI, pero hemos mejorado ligeramente el circuito controlador para adaptarlo a los nuevos requerimientos. De todas formas puedes reutilizar el Pickup, el cable FPC y el circuito de la MKI si ya los tienes.
Resolución
En modo rastering estamos imprimiendo a 600dpi (puntos por pulgada) de resolución. El punto del láser es de aprox. 0,04mm cuando está bien enfocado. ¡Increíblemente fino!.
Auto nivelación de la superficie de impresión
Las últimas versiones de Marlin (el firmware de impresión 3D) incluyen la capacidad de auto nivelar la superficie de impresión y hemos usado esta característica para mejorar la calidad del robot.
Enfoque Automático
Aunque la auto nivelación de la superficie funciona muy bien no es suficiente para la precisión de enfoque que necesitabamos con el láser así que también tuvimos que mejorar la forma en la que el robot enfoca el láser en la superficie de la PCB. Hemos visto en las pruebas que pequeñas diferencias de enfoque sobre la superficie afectan a la calidad de impresión, así que implementamos un sistema más robusto que consiste en tomar cuatro puntos sobre la superficie de impresión y extrapolar los resultados con una ecuación bilineal. Con esa información el robot ajusta el enfoque automáticamente según va imprimiendo y sin usar compleja circuitería.
Electrónica
Estamos utilizando la bien conocida combinación de Arduino Mega + RAMPS 1.4 + Drivers Pololu. Como dijimos anteriormente también utilizamos una versión mejorada del circuito controlador del Pickup que desarrollamos para la MKI.
DiyouFirm MKII
Hemos modificado Marlin para soportar múltiples herramientas y cambiar fácilmente la configuración del firmware en tiempo real. También hemos incluido toda la funcionalidad para gestionar el láser, el sistema de auto-focus e imprimir en modo raster.
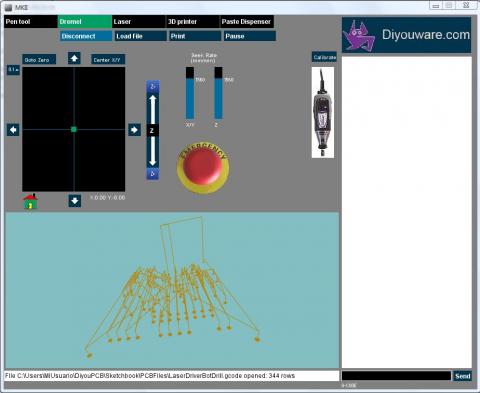
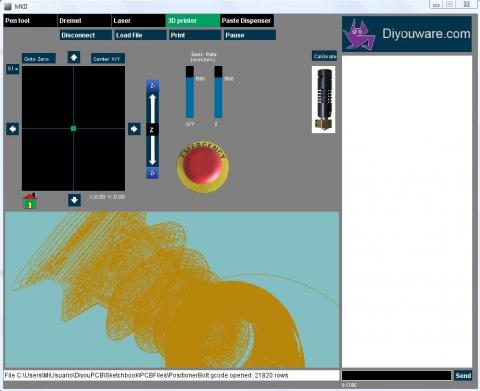
DiyouRun MKII
La nueva versión de software del PC incluye ahora más funcionalidad, especialmente pensada para soportar un entorno multi-herramienta. También incluye funciones para calibrar la impresora, mover los ejes y poder configurar cada una de las herramientas.
Usabilidad
Fue nuestra principal preocupación cuando diseñamos el robot. En general pensamos que todas las herramientas tienen que ser fáciles de usar y sobre todo simples, porque si no probablemente no las usaremos mucho. Por esta razón hemos prestado especial atención a lo fácil y rápido que es cambiar la herramienta del robot y también a la facilidad de uso del software.
Bajo coste
Al igual que en la MKI hemos utilizado materiales fáciles de encontrar, baratos e "imprimibles" mientras sea posible. El robot no será una de estas herramientas caras que solemos ver y que no podemos tener, sino algo asequible. Además puedes reutilizar tu taladro Dremel o Proxxon (si ya tienes uno) y la electrónica de la MKI si ya la hiciste.
- Inicie sesión o regístrese para comentar