DiyouPCB MKII: Preliminary Specifications
The following is a list of preliminary specifications for the new robot:
Working area
70x80x80mm (X,Y,Z). We reduced it considerably to an Arduino Shield size. In fact sometimes we call the robot “The Arduino Shield Maker”. We reduced it because we preferred to do something small but precise. Rarely all of we create big circuit boards but if you need it you can always split the circuit in two or more modules. Reducing the working area has some advantages: the robot is cheaper, more precise, robust, smaller and more manageable.
Motion
MKII is powered by three Nema 17 motors and Acme screws. We substituted the timing belts we used in MKI in order to eliminate vibration and resonances. It was mainly the solution and now the laser draws on the PCB with a stable beam without any mechanic disturbance.
Speed
We can go as fast as 1200-1500mm/min. We think it’s enough for our purposes. The Acme screw pitch set the limits. The robot can go faster upgrading the screws to ones with more pitch but at a price.
Code
MKII support G-Code instead of HP-GL. We also included support of Postscript files and BMP files when drawing with the laser. Eagle can export to PS files very easily. Support BMP files means than in addition to PCBs you can also print and etch pictures on copper, alu, bronze, etc.
Laser
We are using the same PHR-803T pickup than MKI with a wavelenght of 405nm but we slightly changed the Pickup Driver circuit. Anyway you can re-use with few changes: the Pickup, FPC cable and driver board of MKI if you already have them.
Printing Resolution
In rastering mode we actually print at 600dpi resolution. The laser spot is aprox. 0.04 wide when is properly focused. Incredible thin!
Auto bed levelling
Last versions of Marlin includes the capability of auto levelling the printing bed so we used this feature to improve the printing quality.
Auto Focus
Although the auto bed levelling works fine it’s not enough for drawing with the laser so we also improved the auto-focus algorithm. We saw that small focus differences affect printing quality so we implement a robust focusing system which take four points on the printing surface and extrapolate the results with a bilinear equation. Then with that info the robot adjusts the focus automatically as it goes along.
Electronics
We are using the well known combination of Arduino Mega + RAMPS 1.4 + Pololu Drivers. As we said later we also are using an improved version of the Pickup Driver Circuit we developed for MKI.
DiyouFirm MKII
We modified Marlin to support multiple tools and change the tool configuration easily. We also included functionality to manage the laser, the auto-focus system and print in rastering mode.
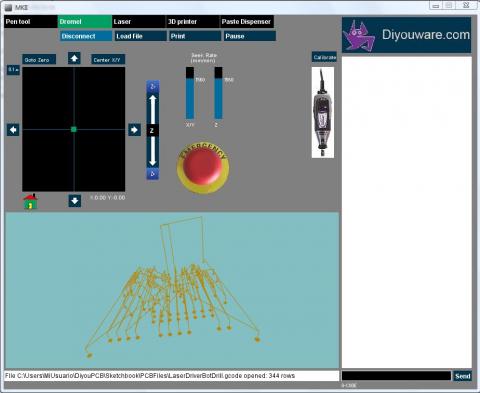
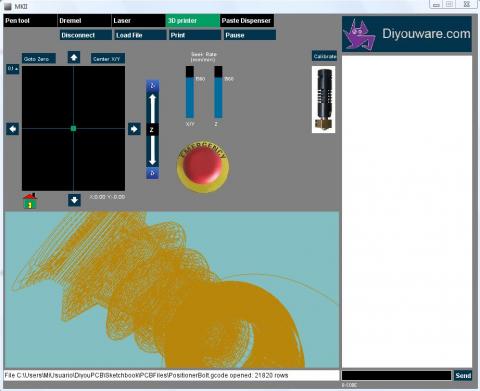
DiyouRun MKII
The new version of the server side software now includes more functionality. It was specially designed for a multi-tool environment. We also added functions to calibrate the printer, move the axis (jogging keypad), and configure each tool.
Usability
It was our main concern while designing the robot. We think that any hobby tool has to be very easy to use and very simple because if not we probably won’t use it very much. We took special care to how easy and fast is to change the toolhead and how usable is the software.
Low cost
We have used materials easy to find, cheap and when possible “printable”. So the robot won’t be one of those expensive machines we use to see and we can’t have. Also you can take advantage of already bought handheld tools like Dremel for drilling, milling, etc. (if you have one), or reuse some electronics components of MKI.