Vecindario Ruidoso
Seguimos luchando con el ruido eléctrico. Como dijimos en anteriores entradas del blog este problema esta afectando a la señal de enfoque.
Estamos utilizando la electrónica del PHR-803T y el método astigmático para enfocar el láser en la PCB. Para obtener la “S-Curve” calculamos y amplificamos las señales A, B, C, D obtenidas del fotodiodo del pickup y generamos con ellas una señal analógica (FE o Focus Error) que leemos desde un puerto del Arduino. De forma similar los reproductores de DVD o Blu-Ray enfocan el rayo láser en la superficie del disco, pero utilizando circuitos más complejos, ya que tienen que hacerlo en tiempo real según la música o la película se están ejecutando. En nuestro caso sólo enfocamos el rayo láser cuando empezamos a imprimir la PCB así que nuestro circuito es más sencillo.
Hemos desarrollado todo este método y la electrónica necesaria el año pasado, y estaba funcionando muy bien en la MKI, pero en la MKII cometimos el error de mezclar los circuitos analógicos y digitales en la misma placa. Así que los circuitos digitales inducen ruido en las señales analógicas que son muy sensibles y eclipsan la “S-Curve”.
Creemos que la solución pasa por aislar los circuitos analógicos y digitales en diferentes áreas de la PCB y usar diferentes líneas de GND y VCC conectadas en una configuración en estrella a un punto común. También reducir al mínimo las pistas por las que viaja el PWM, aislar los pines de los conectores y desacoplar todo con algunos condensadores de tantalo que son más adecuados para la gama de frecuencias que estamos tratando. También hemos incluimos un choke por si filtra algo las frecuencias ruidosas de la fuente de alimentación.
Hemos rediseñamos el circuito y la PCB, y aquí está: (cortesía de ZofzPCB 3D Gerber viewer)
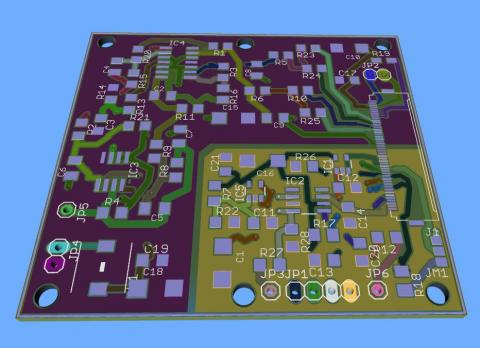
El área más pequeña es el circuito digital: el “vecindario ruidoso”
Vamos a aprovechar la oportunidad e incluir una resistencia para limitar la corriente del diodo láser rojo y evitar así su tendencia al suicidio. También hemos incluido algunos pines y señales para encender/apagar los dos láseres desde el Arduino.
Todavía no lo hemos probado. Ahora tenemos que hacer la PCB, soldar todos los componentes y probar otra vez, así que nos retrasaremos algunas semanas. El resto del robot está más o menos probado y el software desarrollado por lo que sólo tenemos que estar seguros de que podemos enfocar e imprimir las PCB con la calidad requerida.
Tenemos pendiente también diseñar el dispensador de pasta de soldadura. Pedimos algunos motores de pasos pequeños para mover la jeringa y controlar el tiempo de suministro. En cuando los recibamos empezaremos el diseño.
Esto es todo por el momento.
- Inicie sesión o regístrese para comentar